Augsburg, 04.03.2026 (PresseBox) –
Eingang Ost, Stand EO59A
Mit diesem Slogan wirbt KELO Robotics, ein Startup aus Augsburg, für seine neue Antriebe den sogenannten KELO-Drives, die sie für die nächste Generation von autonomen mobilen Servicerobotern und von mobilen Transportrobotern entwickelt haben.
Omnidirektionale Antriebe für maximale Manövrierfähigkeit
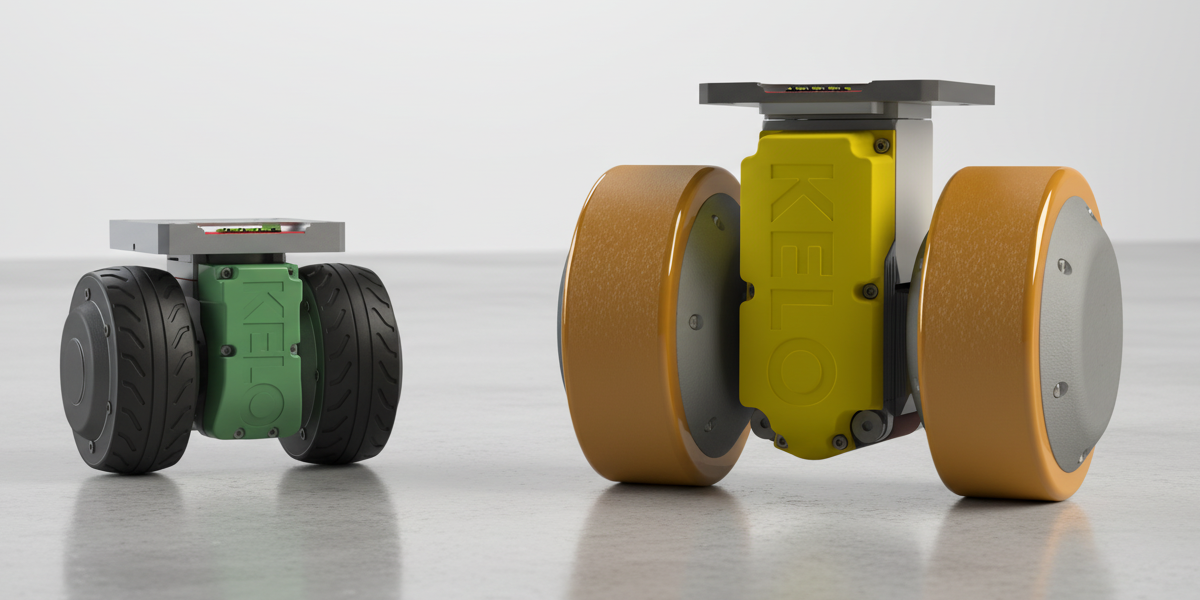
„Neu erfunden“ heißt nicht, dass das Rad noch runder gemacht wurde. KELO-Drives sind sehr kompakte Antriebseinheiten, die neben einigen anderen Vorteilen über zwei herausragende Eigenschaften verfügen, die für zukünftige autonome mobile Transportroboter von essentieller Bedeutung sein werden: sie sind omnidirektional und zugleich nachgiebig.
Es gibt kaum ein Einsatzgebiet von mobilen Transportrobotern, in dem Verkehrs- und Lagerflächen nicht als teure und knappe Ressourcen gelten. Viele Hersteller gehen daher dazu über, in ihren mobilen Robotern omnidirektionale Antriebe zu verbauen. Mit solchen Antrieben können sich Roboter ohne vorherige Dreh- oder Wendemanöver in jede Richtung bewegen und insgesamt sehr platzsparend manövrieren. Diese Manövrierbarkeit ist essentiell, wenn sich die Roboter in verkehrsreichen, engen Gängen bewegen müssen oder auf engem Raum an Lade- oder Abladestationen andocken müssen.
Grenzen bestehender Lösungen: Mecanum-Räder und vertikale Servomotoren
Lange waren sogenannte Mecanum-Räder oder Omni-Wheels und Räder, die mit einem vertikalen Servomotor gelenkt wurden, die einzigen Lösungen für einen omnidirektionalen Antrieb. Beide Lösungen haben erhebliche Nachteile.
Bei den Mecanum-Rädern handelt es sich nicht um komplette Antriebe, sondern um spezielle Räder. Sie sind sehr anfällig für Verschmutzung, Bodenunebenheiten und Schockbelastungen wie sie auf einem Industrieboden immer auftreten. Omnidirektionale Antriebe mit einem vertikalen Steuermotor erzeugen hohe Reibungskräfte und haben einen sehr hohen Stromverbrauch, wenn sie im Stand gelenkt werden müssen.
Plug-and-Play-Design mit integrierter Sensorik
Diese Nachteile vermeiden KELO-Drives. In einem kompakten Plug-and-Play-Design kombiniert jede Einheit zwei getriebelose Nabenmotoren, Encoder und weitere Sensoren, Steuerungs- und Leistungselektronik sowie eine Radaufhängung auf engstem Bauraum. Die Stromversorgung und Kommunikation erfolgen über einen speziellen Verbindungsstecker. Per Software lassen sich Drehzahl und Drehmoment der Antriebe, sowie die omnidirektionale Bewegung des Roboters steuern. KELO-Antriebe sind einfach zu installieren und lassen sich problemlos in bestehende Fahrzeugrahmen integrieren. Bereits mit zwei Antrieben erreicht ein Roboter volle omnidirektionale Beweglichkeit; weitere Antriebe erhöhen Nutzlast, Redundanz und Laufruhe. Die flexible Anordnung unter dem Fahrzeugrahmen ermöglicht eine hohe Designflexibilität für verschiedene Fahrzeuglayouts und Anwendungen. Jeder Antrieb trägt je nach Modell zwischen 125 und 500 kg Last. Die aktuelle Produktfamilie umfasst Antriebe mit Raddurchmessern von 100 mm, 165 mm und 300 mm.
Nachgiebigkeit als Schlüssel für sichere Mensch-Roboter-Kollaboration
KELO-Drives sind nicht nur omnidirektional, sondern sie sind auch nachgiebig. Sie können über interne Sensoren feststellen, wenn eine externe Kraft auf den Roboter ausgeübt wird. Sie können dieser Kraft nachgeben und ausweichen. Damit können Roboter, die sich einem Menschen in unerwünschter Weise nähern, einfach zurück oder zur Seite geschoben werden. Diese Eigenschaft ist einzigartig und bekommt große Bedeutung, wenn Roboter und Menschen auf engstem Raum zusammenarbeiten müssen.